FreeRTOS 任务优先级分配方案
任务优先级说明
下面对 FreeRTOS 优先级相关的几个重要知识点进行下说明,这些知识点在以后的使用中务必要掌握牢固。
? FreeRTOS 中任务的最高优先级是通过 FreeRTOSConfig.h 文件中的 configMAX_PRIORITIES 进行
配置的,用户实际可以使用的优先级范围是 0 到 configMAX_PRIORITIES – 1。比如我们配置此宏定
义为 5,那么用户可以使用的优先级号是 0,1,2,3,4,不包含 5,对于这一点,初学者要特别的注意。
? 用户配置任务的优先级数值越小,那么此任务的优先级越低,空闲任务的优先级是 0。
? 建议用户配置宏定义 configMAX_PRIORITIES 的最大值不要超过 32,即用户任务可以使用的优先级
范围是0到31。因为对于CM内核的移植文件,用户任务的优先级不是大于等于32的话, portmacro.h
文件中的宏定义configUSE_PORT_OPTIMISED_TASK_SELECTION会优化优先级列表中要执行的最
高优先级任务的获取算法(对于 CM 内核的移植文件,此宏定义默认是使能的,当然,用户也可以在
FreeRTOSConfig.h 文件中进行配置)。 相比通用的最高优先级任务获取算法,这两种方式的对比如
下:
? 通用方式,没有优化---配置宏定义 configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0:
? 所有平台的移植文件都可以配置为 0,因为这是通用方式。
? 纯 C 编写,比专用方式效率低。
? 可用的优先级数量不限制。
? 专用方式,进行优化---配置宏定义 configUSE_PORT_OPTIMISED_TASK_SELECTION 为为 1:
? 部分平台支持。
? 这些平台架构有专用的汇编指令,比如 CLZ(Count Leading Zeros)指令,通过这些指令可以加速算法执行速度。
? 比通用方式高效。
? 有最大优先级数限制,通常限制为 32 个。
? 如果用户在 FreeRTOSConfig.h 文件中配置宏定义 configUSE_TIME_SLICING 为 1,或者没有配置
此宏定义,时间片调度都是使能的。 另外,只要芯片资源允许,可以配置任意多个同优先级任务。
(备注:没有定义 configUSE_TIME_SLICING,也能使用时间片调度是因为此宏定义默认已经在
FreeRTOS.h 文件中使能)
? FreeRTOS 中处于运行状态的任务永远是当前能够运行的最高优先级任务。 下一章节讲解调度器,大
家会对这个知识点有一个全面的认识。
任务优先级分配方案
对于初学者,有时候会纠结任务优先级设置为多少合适,因为任务优先级设置多少是没有标准的。对
于这个问题,我们这里为大家推荐一个标准,任务优先级设置推荐方式如下图 13.1 所示:
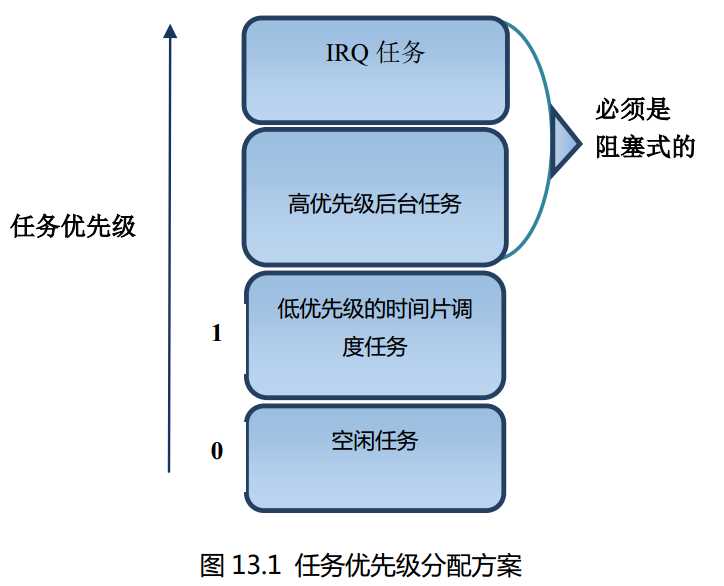
? IRQ 任务:IRQ 任务是指通过中断服务程序进行触发的任务,此类任务应该设置为所有任务里面优先级最高的。
? 高优先级后台任务:比如按键检测,触摸检测,USB 消息处理,串口消息处理等,都可以归为这一类任务。
? 低优先级的时间片调度任务:比如 emWin 的界面显示,LED 数码管的显示等不需要实时执行的都可以归为这一类任务。 实际应用中用户不必拘泥于将这些任务都设置为优先级 1 的同优先级任务,可以设置多个优先级,只需注意这类任务不需要高实时性。
? 空闲任务:空闲任务是系统任务。
? 特别注意:IRQ 任务和高优先级任务必须设置为阻塞式(调用消息等待或者延迟等函数即可),只有
这样,高优先级任务才会释放 CPU 的使用权,,从而低优先级任务才有机会得到执行。
这里的优先级分配方案是我们推荐的一种方式,实际项目也可以不采用这种方法。 调试出适合项目需求的才是最好的。
中断优先级和任务优先级区别
部分初学者也容易在这两个概念上面出现问题。 简单的说,这两个之间没有任何关系,不管中断的优
先级是多少,中断的优先级永远高于任何任务的优先级,即任务在执行的过程中,中断来了就开始执行中
断服务程序。
另外对于 STM32F103,F407 和 F429 来说,中断优先级的数值越小,优先级越高。 而 FreeRTOS
的任务优先级是,任务优先级数值越小,任务优先级越低。