AHRS(attitude and heading reference system)称为航姿参考系统。
首先,我们明确一下四元数的知识。
四元数(quaternion)是由我们的威廉·哈密顿提出的。哈密顿就是那个‘哈密顿最小作用原理’的提出者。
四元数可视为复数的扩展。在复数中,定义了,而四元数中则定义了
。也就是说四元数是一个具有三个虚部的虚数。把这些虚部理解为一个复数空间的话,四元数就是一个四位空间。这个是纯数学问题,有兴趣可以了解群论,本人也不是很理解所以也不多讲啦。
但是四元数本身最多的就是使用单位四元数来表示三维空间的旋转(rotation)及定向(orientation)。
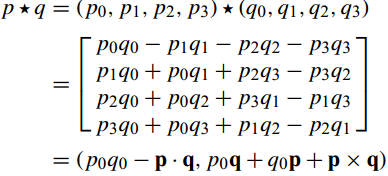
为了方便,我们下面使用q = ((x, y, z),w) = (v, w),其中v是向量,w是实数,这样的式子来表示一个四元数。下述内容采自知乎。
首先,定义一个你需要做的旋转。旋转轴为向量,旋转角度为
(右手法则的旋转)。如下图所示:
此图中,
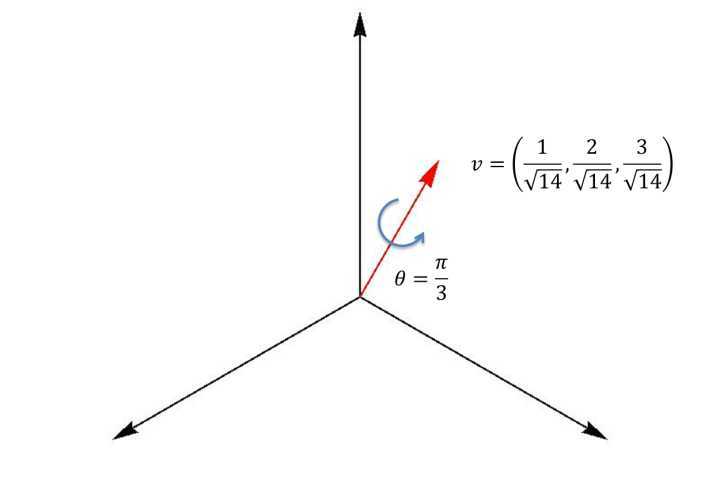
那么与此相对应的四元数(下三行式子都是一个意思,只是不同的表达形式)
这时它的共轭(下三行式子都是一个意思,只是不同的表达形式),
如果你想算一个点在这个旋转下新的坐标
,需要进行如下操作,
1.定义纯四元数
2.进行四元数运算
3.产生的一定是纯四元数,也就是说它的第一项为0,有如下形式:
4.中的后三项
就是
:
这样,就完成了一次四元数旋转运算。
同理,如果你有一个四元数:
那么,它对应一个以向量为轴旋转
角度的旋转操作(右手法则的旋转)。
 是描述了B相对于A的旋转,其中的rx,ry,rz组成的向量也是处于A中的向量。
是描述了B相对于A的旋转,其中的rx,ry,rz组成的向量也是处于A中的向量。 。我们有:
。我们有:

- 封闭性:易证明,p和p的共轭相乘即可,|p*q|=1。
- 结合律:这条也很好证明,只要证明(p*q)*r=p*(q*r)。
更多资料可以参考:https://zhuanlan.zhihu.com/p/28189289
我们下一步来看一下通过陀螺仪输出的角加速度估计姿态问题。
数学操作部分:
如果那些角速度被分配到向量 的时候,即
的时候,即
的时候。
表示传感器所在坐标相对于地磁坐标的姿态改变速率的四元数微分可以表示为下边公式:
 为从E坐标到S坐标的预测值。
为从E坐标到S坐标的预测值。
而在时间t,地球坐标系相对于传感器坐标系的四元数 可以同过
可以同过 的积分获得。而是通过预测值
的积分获得。而是通过预测值 与时间t时刻形成的角速度
与时间t时刻形成的角速度 的叉乘获得的。
的叉乘获得的。
在不在对q进行二次处理的话,姿态预测值就是现在的姿态值。
下面就是一个求解传感器所在坐标系的姿态。
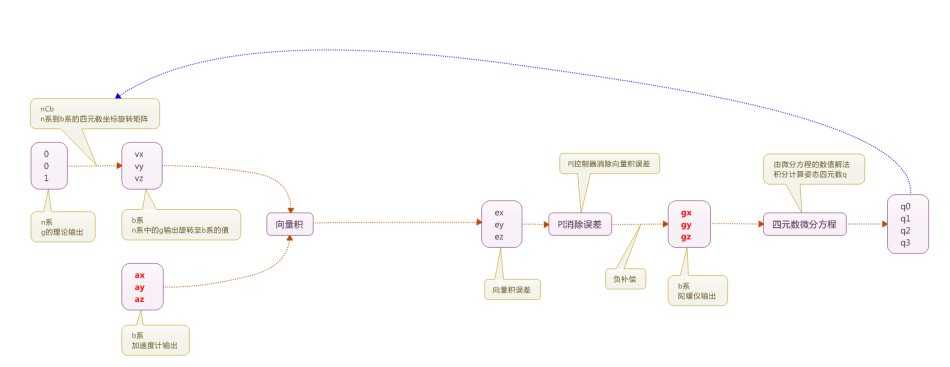
开始,基于一个初始为[1 0 0 0]的四元数得到 q = [1 0 0 0], 根据加速度求得加速度的单位向量,根据q求转换到b系的值v。
而 v = [2*(q(2)*q(4)-q(1)*q(3)) 2*(q(1)*q(2)+q(3)*q(4)) q(1)^2 -q(2)^2 -q(3)^2+q(4)^2]
而后计算误差,其中加速度与计算得到的v的向量积可以得到误差值。
计算得到的积分误差为误差的积分,即误差和加上误差乘以采样时间。
classdef MahonyAHRS < handle
%MAYHONYAHRS Madgwick‘s implementation of Mayhony‘s AHRS algorithm
%
% For more information see:
% http://www.x-io.co.uk/node/8#open_source_ahrs_and_imu_algorithms
%
% Date Author Notes
% 28/09/2011 SOH Madgwick Initial release
%% Public properties
properties (Access = public)
SamplePeriod = 1/256;
Quaternion = [1 0 0 0]; % output quaternion describing the Earth relative to the sensor
Kp = 1; % algorithm proportional gain
Ki = 0; % algorithm integral gain
end
%% Public properties
properties (Access = private)
eInt = [0 0 0]; % integral error
end
%% Public methods
methods (Access = public)
function obj = MahonyAHRS(varargin)
for i = 1:2:nargin
if strcmp(varargin{i}, ‘SamplePeriod‘), obj.SamplePeriod = varargin{i+1};
elseif strcmp(varargin{i}, ‘Quaternion‘), obj.Quaternion = varargin{i+1};
elseif strcmp(varargin{i}, ‘Kp‘), obj.Kp = varargin{i+1};
elseif strcmp(varargin{i}, ‘Ki‘), obj.Ki = varargin{i+1};
else error(‘Invalid argument‘);
end
end;
end
function obj = Update(obj, Gyroscope, Accelerometer, Magnetometer)
q = obj.Quaternion; % short name local variable for readability
% Normalise accelerometer measurement
if(norm(Accelerometer) == 0), return; end % handle NaN
Accelerometer = Accelerometer / norm(Accelerometer); % normalise magnitude
% Normalise magnetometer measurement
if(norm(Magnetometer) == 0), return; end % handle NaN
Magnetometer = Magnetometer / norm(Magnetometer); % normalise magnitude
% Reference direction of Earth‘s magnetic feild
h = quaternProd(q, quaternProd([0 Magnetometer], quaternConj(q)));
b = [0 norm([h(2) h(3)]) 0 h(4)];
% Estimated direction of gravity and magnetic field
v = [2*(q(2)*q(4) - q(1)*q(3))
2*(q(1)*q(2) + q(3)*q(4))
q(1)^2 - q(2)^2 - q(3)^2 + q(4)^2];
w = [2*b(2)*(0.5 - q(3)^2 - q(4)^2) + 2*b(4)*(q(2)*q(4) - q(1)*q(3))
2*b(2)*(q(2)*q(3) - q(1)*q(4)) + 2*b(4)*(q(1)*q(2) + q(3)*q(4))
2*b(2)*(q(1)*q(3) + q(2)*q(4)) + 2*b(4)*(0.5 - q(2)^2 - q(3)^2)];
% Error is sum of cross product between estimated direction and measured direction of fields
e = cross(Accelerometer, v) + cross(Magnetometer, w);
if(obj.Ki > 0)
obj.eInt = obj.eInt + e * obj.SamplePeriod;
else
obj.eInt = [0 0 0];
end
% Apply feedback terms
Gyroscope = Gyroscope + obj.Kp * e + obj.Ki * obj.eInt;
% Compute rate of change of quaternion
qDot = 0.5 * quaternProd(q, [0 Gyroscope(1) Gyroscope(2) Gyroscope(3)]);
% Integrate to yield quaternion
q = q + qDot * obj.SamplePeriod;
obj.Quaternion = q / norm(q); % normalise quaternion
end
function obj = UpdateIMU(obj, Gyroscope, Accelerometer)
q = obj.Quaternion; % short name local variable for readability
% Normalise accelerometer measurement
if(norm(Accelerometer) == 0), return; end % handle NaN
Accelerometer = Accelerometer / norm(Accelerometer); % normalise magnitude
% Estimated direction of gravity and magnetic flux
v = [2*(q(2)*q(4) - q(1)*q(3))
2*(q(1)*q(2) + q(3)*q(4))
q(1)^2 - q(2)^2 - q(3)^2 + q(4)^2];
% Error is sum of cross product between estimated direction and measured direction of field
e = cross(Accelerometer, v);
if(obj.Ki > 0)
obj.eInt = obj.eInt + e * obj.SamplePeriod;
else
obj.eInt = [0 0 0];
end
% Apply feedback termszai
Gyroscope = Gyroscope + obj.Kp * e + obj.Ki * obj.eInt;
% Compute rate of change of quaternion
qDot = 0.5 * quaternProd(q, [0 Gyroscope(1) Gyroscope(2) Gyroscope(3)]);
% Integrate to yield quaternion
q = q + qDot * obj.SamplePeriod;
obj.Quaternion = q / norm(q); % normalise quaternion
end
end
end
%% Housekeeping
addpath(‘ximu_matlab_library‘); % include x-IMU MATLAB library
addpath(‘quaternion_library‘); % include quatenrion library
close all; % close all figures
clear; % clear all variables
clc; % clear the command terminal
%% Import data
xIMUdata = xIMUdataClass(‘LoggedData/LoggedData‘);
samplePeriod = 1/256;
gyr = [xIMUdata.CalInertialAndMagneticData.Gyroscope.X...
xIMUdata.CalInertialAndMagneticData.Gyroscope.Y...
xIMUdata.CalInertialAndMagneticData.Gyroscope.Z]; % gyroscope
acc = [xIMUdata.CalInertialAndMagneticData.Accelerometer.X...
xIMUdata.CalInertialAndMagneticData.Accelerometer.Y...
xIMUdata.CalInertialAndMagneticData.Accelerometer.Z]; % accelerometer
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Gyroscope‘);
hold on;
plot(gyr(:,1), ‘r‘);
plot(gyr(:,2), ‘g‘);
plot(gyr(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘dps‘);
title(‘Gyroscope‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Accelerometer‘);
hold on;
plot(acc(:,1), ‘r‘);
plot(acc(:,2), ‘g‘);
plot(acc(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘Accelerometer‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% Process data through AHRS algorithm (calcualte orientation)
% See: http://www.x-io.co.uk/open-source-imu-and-ahrs-algorithms/
R = zeros(3,3,length(gyr)); % rotation matrix describing sensor relative to Earth
ahrs = MahonyAHRS(‘SamplePeriod‘, samplePeriod, ‘Kp‘, 1);
for i = 1:length(gyr)
ahrs.UpdateIMU(gyr(i,:) * (pi/180), acc(i,:)); % gyroscope units must be radians
R(:,:,i) = quatern2rotMat(ahrs.Quaternion)‘; % transpose because ahrs provides Earth relative to sensor
end
%% Calculate ‘tilt-compensated‘ accelerometer
tcAcc = zeros(size(acc)); % accelerometer in Earth frame
for i = 1:length(acc)
tcAcc(i,:) = R(:,:,i) * acc(i,:)‘;
end
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘‘‘Tilt-Compensated‘‘ accelerometer‘);
hold on;
plot(tcAcc(:,1), ‘r‘);
plot(tcAcc(:,2), ‘g‘);
plot(tcAcc(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘‘‘Tilt-compensated‘‘ accelerometer‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% Calculate linear acceleration in Earth frame (subtracting gravity)
linAcc = tcAcc - [zeros(length(tcAcc), 1), zeros(length(tcAcc), 1), ones(length(tcAcc), 1)];
linAcc = linAcc * 9.81; % convert from ‘g‘ to m/s/s
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Linear Acceleration‘);
hold on;
plot(linAcc(:,1), ‘r‘);
plot(linAcc(:,2), ‘g‘);
plot(linAcc(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘Linear acceleration‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% Calculate linear velocity (integrate acceleartion)
linVel = zeros(size(linAcc));
for i = 2:length(linAcc)
linVel(i,:) = linVel(i-1,:) + linAcc(i,:) * samplePeriod;
end
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Linear Velocity‘);
hold on;
plot(linVel(:,1), ‘r‘);
plot(linVel(:,2), ‘g‘);
plot(linVel(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘Linear velocity‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% High-pass filter linear velocity to remove drift
order = 1;
filtCutOff = 0.1;
[b, a] = butter(order, (2*filtCutOff)/(1/samplePeriod), ‘high‘);
linVelHP = filtfilt(b, a, linVel);
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘High-pass filtered Linear Velocity‘);
hold on;
plot(linVelHP(:,1), ‘r‘);
plot(linVelHP(:,2), ‘g‘);
plot(linVelHP(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘High-pass filtered linear velocity‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% Calculate linear position (integrate velocity)
linPos = zeros(size(linVelHP));
for i = 2:length(linVelHP)
linPos(i,:) = linPos(i-1,:) + linVelHP(i,:) * samplePeriod;
end
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘Linear Position‘);
hold on;
plot(linPos(:,1), ‘r‘);
plot(linPos(:,2), ‘g‘);
plot(linPos(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘Linear position‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% High-pass filter linear position to remove drift
order = 1;
filtCutOff = 0.1;
[b, a] = butter(order, (2*filtCutOff)/(1/samplePeriod), ‘high‘);
linPosHP = filtfilt(b, a, linPos);
% Plot
figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘High-pass filtered Linear Position‘);
hold on;
plot(linPosHP(:,1), ‘r‘);
plot(linPosHP(:,2), ‘g‘);
plot(linPosHP(:,3), ‘b‘);
xlabel(‘sample‘);
ylabel(‘g‘);
title(‘High-pass filtered linear position‘);
legend(‘X‘, ‘Y‘, ‘Z‘);
%% Play animation
SamplePlotFreq = 8;
SixDOFanimation(linPosHP, R, ...
‘SamplePlotFreq‘, SamplePlotFreq, ‘Trail‘, ‘Off‘, ...
‘Position‘, [9 39 1280 720], ...
‘AxisLength‘, 0.1, ‘ShowArrowHead‘, false, ...
‘Xlabel‘, ‘X (m)‘, ‘Ylabel‘, ‘Y (m)‘, ‘Zlabel‘, ‘Z (m)‘, ‘ShowLegend‘, false, ‘Title‘, ‘Unfiltered‘,...
‘CreateAVI‘, false, ‘AVIfileNameEnum‘, false, ‘AVIfps‘, ((1/samplePeriod) / SamplePlotFreq));
%% End of script
function fig = SixDOFanimation(varargin)
%% Create local variables
% Required arguments
p = varargin{1}; % position of body
R = varargin{2}; % rotation matrix of body
[numSamples dummy] = size(p);
% Default values of optional arguments
SamplePlotFreq = 1;
Trail = ‘Off‘;
LimitRatio = 1;
Position = [];
FullScreen = false;
View = [30 20];
AxisLength = 1;
ShowArrowHead = ‘on‘;
Xlabel = ‘X‘;
Ylabel = ‘Y‘;
Zlabel = ‘Z‘;
Title = ‘6DOF Animation‘;
ShowLegend = true;
CreateAVI = false;
AVIfileName = ‘6DOF Animation‘;
AVIfileNameEnum = true;
AVIfps = 30;
for i = 3:2:nargin
if strcmp(varargin{i}, ‘SamplePlotFreq‘), SamplePlotFreq = varargin{i+1};
elseif strcmp(varargin{i}, ‘Trail‘)
Trail = varargin{i+1};
if(~strcmp(Trail, ‘Off‘) && ~strcmp(Trail, ‘DotsOnly‘) && ~strcmp(Trail, ‘All‘))
error(‘Invalid argument. Trail must be ‘‘Off‘‘, ‘‘DotsOnly‘‘ or ‘‘All‘‘.‘);
end
elseif strcmp(varargin{i}, ‘LimitRatio‘), LimitRatio = varargin{i+1};
elseif strcmp(varargin{i}, ‘Position‘), Position = varargin{i+1};
elseif strcmp(varargin{i}, ‘FullScreen‘), FullScreen = varargin{i+1};
elseif strcmp(varargin{i}, ‘View‘), View = varargin{i+1};
elseif strcmp(varargin{i}, ‘AxisLength‘), AxisLength = varargin{i+1};
elseif strcmp(varargin{i}, ‘ShowArrowHead‘), ShowArrowHead = varargin{i+1};
elseif strcmp(varargin{i}, ‘Xlabel‘), Xlabel = varargin{i+1};
elseif strcmp(varargin{i}, ‘Ylabel‘), Ylabel = varargin{i+1};
elseif strcmp(varargin{i}, ‘Zlabel‘), Zlabel = varargin{i+1};
elseif strcmp(varargin{i}, ‘Title‘), Title = varargin{i+1};
elseif strcmp(varargin{i}, ‘ShowLegend‘), ShowLegend = varargin{i+1};
elseif strcmp(varargin{i}, ‘CreateAVI‘), CreateAVI = varargin{i+1};
elseif strcmp(varargin{i}, ‘AVIfileName‘), AVIfileName = varargin{i+1};
elseif strcmp(varargin{i}, ‘AVIfileNameEnum‘), AVIfileNameEnum = varargin{i+1};
elseif strcmp(varargin{i}, ‘AVIfps‘), AVIfps = varargin{i+1};
else error(‘Invalid argument.‘);
end
end;
%% Reduce data to samples to plot only
p = p(1:SamplePlotFreq:numSamples, :);
R = R(:, :, 1:SamplePlotFreq:numSamples) * AxisLength;
if(numel(View) > 2)
View = View(1:SamplePlotFreq:numSamples, :);
end
[numPlotSamples dummy] = size(p);
%% Setup AVI file
aviobj = []; % create null object
if(CreateAVI)
fileName = strcat(AVIfileName, ‘.avi‘);
if(exist(fileName, ‘file‘))
if(AVIfileNameEnum) % if file name exists and enum enabled
i = 0;
while(exist(fileName, ‘file‘)) % find un-used file name by appending enum
fileName = strcat(AVIfileName, sprintf(‘%i‘, i), ‘.avi‘);
i = i + 1;
end
else % else file name exists and enum disabled
fileName = []; % file will not be created
end
end
if(isempty(fileName))
sprintf(‘AVI file not created as file already exists.‘)
else
aviobj = avifile(fileName, ‘fps‘, AVIfps, ‘compression‘, ‘Cinepak‘, ‘quality‘, 100);
end
end
%% Setup figure and plot
% Create figure
fig = figure(‘NumberTitle‘, ‘off‘, ‘Name‘, ‘6DOF Animation‘);
if(FullScreen)
screenSize = get(0, ‘ScreenSize‘);
set(fig, ‘Position‘, [0 0 screenSize(3) screenSize(4)]);
elseif(~isempty(Position))
set(fig, ‘Position‘, Position);
end
set(gca, ‘drawmode‘, ‘fast‘);
lighting phong;
set(gcf, ‘Renderer‘, ‘zbuffer‘);
hold on;
axis equal;
grid on;
view(View(1, 1), View(1, 2));
title(i);
xlabel(Xlabel);
ylabel(Ylabel);
zlabel(Zlabel);
% Create plot data arrays
if(strcmp(Trail, ‘DotsOnly‘) || strcmp(Trail, ‘All‘))
x = zeros(numPlotSamples, 1);
y = zeros(numPlotSamples, 1);
z = zeros(numPlotSamples, 1);
end
if(strcmp(Trail, ‘All‘))
ox = zeros(numPlotSamples, 1);
oy = zeros(numPlotSamples, 1);
oz = zeros(numPlotSamples, 1);
ux = zeros(numPlotSamples, 1);
vx = zeros(numPlotSamples, 1);
wx = zeros(numPlotSamples, 1);
uy = zeros(numPlotSamples, 1);
vy = zeros(numPlotSamples, 1);
wy = zeros(numPlotSamples, 1);
uz = zeros(numPlotSamples, 1);
vz = zeros(numPlotSamples, 1);
wz = zeros(numPlotSamples, 1);
end
x(1) = p(1,1);
y(1) = p(1,2);
z(1) = p(1,3);
ox(1) = x(1);
oy(1) = y(1);
oz(1) = z(1);
ux(1) = R(1,1,1:1);
vx(1) = R(2,1,1:1);
wx(1) = R(3,1,1:1);
uy(1) = R(1,2,1:1);
vy(1) = R(2,2,1:1);
wy(1) = R(3,2,1:1);
uz(1) = R(1,3,1:1);
vz(1) = R(2,3,1:1);
wz(1) = R(3,3,1:1);
% Create graphics handles
orgHandle = plot3(x, y, z, ‘k.‘);
if(ShowArrowHead)
ShowArrowHeadStr = ‘on‘;
else
ShowArrowHeadStr = ‘off‘;
end
quivXhandle = quiver3(ox, oy, oz, ux, vx, wx, ‘r‘, ‘ShowArrowHead‘, ShowArrowHeadStr, ‘MaxHeadSize‘, 0.999999, ‘AutoScale‘, ‘off‘);
quivYhandle = quiver3(ox, oy, oz, uy, vy, wy, ‘g‘, ‘ShowArrowHead‘, ShowArrowHeadStr, ‘MaxHeadSize‘, 0.999999, ‘AutoScale‘, ‘off‘);
quivZhandle = quiver3(ox, ox, oz, uz, vz, wz, ‘b‘, ‘ShowArrowHead‘, ShowArrowHeadStr, ‘MaxHeadSize‘, 0.999999, ‘AutoScale‘, ‘off‘);
% Create legend
if(ShowLegend)
legend(‘Origin‘, ‘X‘, ‘Y‘, ‘Z‘);
end
% Set initial limits
Xlim = [x(1)-AxisLength x(1)+AxisLength] * LimitRatio;
Ylim = [y(1)-AxisLength y(1)+AxisLength] * LimitRatio;
Zlim = [z(1)-AxisLength z(1)+AxisLength] * LimitRatio;
set(gca, ‘Xlim‘, Xlim, ‘Ylim‘, Ylim, ‘Zlim‘, Zlim);
% Set initial view
view(View(1, :));
%% Plot one sample at a time
for i = 1:numPlotSamples
% Update graph title
if(strcmp(Title, ‘‘))
titleText = sprintf(‘Sample %i of %i‘, 1+((i-1)*SamplePlotFreq), numSamples);
else
titleText = strcat(Title, ‘ (‘, sprintf(‘Sample %i of %i‘, 1+((i-1)*SamplePlotFreq), numSamples), ‘)‘);
end
title(titleText);
% Plot body x y z axes
if(strcmp(Trail, ‘DotsOnly‘) || strcmp(Trail, ‘All‘))
x(1:i) = p(1:i,1);
y(1:i) = p(1:i,2);
z(1:i) = p(1:i,3);
else
x = p(i,1);
y = p(i,2);
z = p(i,3);
end
if(strcmp(Trail, ‘All‘))
ox(1:i) = p(1:i,1);
oy(1:i) = p(1:i,2);
oz(1:i) = p(1:i,3);
ux(1:i) = R(1,1,1:i);
vx(1:i) = R(2,1,1:i);
wx(1:i) = R(3,1,1:i);
uy(1:i) = R(1,2,1:i);
vy(1:i) = R(2,2,1:i);
wy(1:i) = R(3,2,1:i);
uz(1:i) = R(1,3,1:i);
vz(1:i) = R(2,3,1:i);
wz(1:i) = R(3,3,1:i);
else
ox = p(i,1);
oy = p(i,2);
oz = p(i,3);
ux = R(1,1,i);
vx = R(2,1,i);
wx = R(3,1,i);
uy = R(1,2,i);
vy = R(2,2,i);
wy = R(3,2,i);
uz = R(1,3,i);
vz = R(2,3,i);
wz = R(3,3,i);
end
set(orgHandle, ‘xdata‘, x, ‘ydata‘, y, ‘zdata‘, z);
set(quivXhandle, ‘xdata‘, ox, ‘ydata‘, oy, ‘zdata‘, oz,‘udata‘, ux, ‘vdata‘, vx, ‘wdata‘, wx);
set(quivYhandle, ‘xdata‘, ox, ‘ydata‘, oy, ‘zdata‘, oz,‘udata‘, uy, ‘vdata‘, vy, ‘wdata‘, wy);
set(quivZhandle, ‘xdata‘, ox, ‘ydata‘, oy, ‘zdata‘, oz,‘udata‘, uz, ‘vdata‘, vz, ‘wdata‘, wz);
% Adjust axes for snug fit and draw
axisLimChanged = false;
if((p(i,1) - AxisLength) < Xlim(1)), Xlim(1) = p(i,1) - LimitRatio*AxisLength; axisLimChanged = true; end
if((p(i,2) - AxisLength) < Ylim(1)), Ylim(1) = p(i,2) - LimitRatio*AxisLength; axisLimChanged = true; end
if((p(i,3) - AxisLength) < Zlim(1)), Zlim(1) = p(i,3) - LimitRatio*AxisLength; axisLimChanged = true; end
if((p(i,1) + AxisLength) > Xlim(2)), Xlim(2) = p(i,1) + LimitRatio*AxisLength; axisLimChanged = true; end
if((p(i,2) + AxisLength) > Ylim(2)), Ylim(2) = p(i,2) + LimitRatio*AxisLength; axisLimChanged = true; end
if((p(i,3) + AxisLength) > Zlim(2)), Zlim(2) = p(i,3) + LimitRatio*AxisLength; axisLimChanged = true; end
if(axisLimChanged), set(gca, ‘Xlim‘, Xlim, ‘Ylim‘, Ylim, ‘Zlim‘, Zlim); end
drawnow;
% Adjust view
if(numel(View) > 2)
view(View(i, :));
end
% Add frame to AVI object
if(~isempty(aviobj))
frame = getframe(fig);
aviobj = addframe(aviobj, frame);
end
end
hold off;
% Close AVI file
if(~isempty(aviobj))
aviobj = close(aviobj);
end
end
其中可以通过更改PI部分参数,重力补偿值和滤波频率,来适应自己的信号。
如果想要了解更多细节获得源程序,可以查看原官方资料网站: