PCL—低层次视觉—点云分割(LCCP)
1.图像分割的两条思路
场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础。但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的。图像分割的搞法大概有两种:剑宗——自低向上:先将图像聚类成小的像素团再慢慢合并,气宗——自顶向下:用多尺度模板分割图像,再进一步将图像优化分割成不同物体。当然,还有将二者合而为一的方法:training with data set. 这第三种方法也不好,太依赖于已知的物体而失去了灵活性。家庭机器人面对家里越来越多的东西需要一种非训练且效果很好的分割法。 Object Partitioning using Local Convexity 一文的作者从古籍中(也不老,1960s左右吧),找到了一种基于凹凸性的分割方法。实际上基于凹凸的图像理解在之前是被研究过的,但是随着神经网络的出现,渐渐这种从明确物理意义入手的图像"理解"方法就被淹没了。对于二维图像而言,其凹凸性较难描述,但对于三维图像而言,凹凸几乎是与生俱来的性质。
2.LCCP方法
LCCP是Locally Convex Connected Patches的缩写,翻译成中文叫做 ”局部凸连接打包一波带走“~~~算法大致可以分成两个部分:1.基于超体聚类的过分割。2.在超体聚类的基础上再聚类。超体聚类作为一种过分割方法,在理想情况下是不会引入错误信息的,也就是说适合在此基础上再进行处理。关于超体聚类相关内容见我的博文:超体聚类。 LCCP方法并不依赖于点云颜色,所以只使用空间信息和法线信息,wc=0。ws=1,wn=4。
点云完成超体聚类之后,对于过分割的点云需要计算不同的块之间凹凸关系。凹凸关系通过 CC(Extended Convexity Criterion) 和 SC (Sanity criterion)判据来进行判断。其中 CC 利用相邻两片中心连线向量与法向量夹角来判断两片是凹是凸。显然,如果图中a1>a2则为凹,反之则为凸。
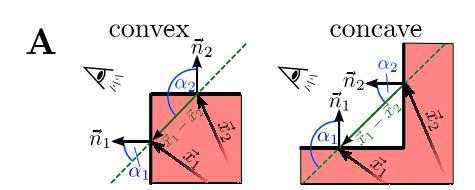
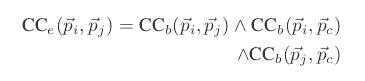
考虑到测量噪声等因素,需要在实际使用过程中引入门限值(a1需要比a2大出一定量)来滤出较小的凹凸误判。此外,为去除一些小噪声引起的误判,还需要引入“第三方验证”,如果某块和相邻两块都相交,则其凹凸关系必相同。CC 判据最终如CCe:

如果相邻两面中,有一个面是单独的,cc判据是无法将其分开的。举个简单的例子,两本厚度不同的书并排放置,视觉算法应该将两本书分割开。如果是台阶,则视觉算法应该将台阶作为一个整体。本质上就是因为厚度不同的书存在surface-singularities。为此需要引入SC判据,来对此进行区分。
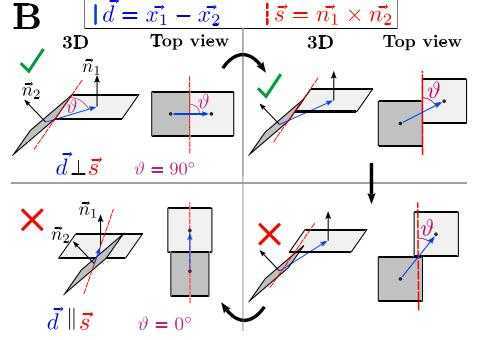
如图所示,相邻两面是否真正联通,是否存在单独面,与θ角有关,θ角越大,则两面真的形成凸关系的可能性就越大。据此,可以设计SC判据:
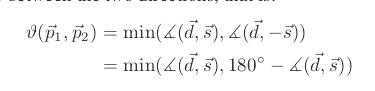


其中S(向量)为两平面法向量的叉积。
最终,两相邻面之间凸边判据为:

在标记完各个小区域的凹凸关系后,则采用区域增长算法将小区域聚类成较大的物体。此区域增长算法受到小区域凹凸性限制,既:
只允许区域跨越凸边增长。
至此,分割完成,在滤去多余噪声后既获得点云分割结果。此外:考虑到RGB-D图像随深度增加而离散,难以确定八叉树尺寸,故在z方向使用对数变换以提高精度。分割结果如图:
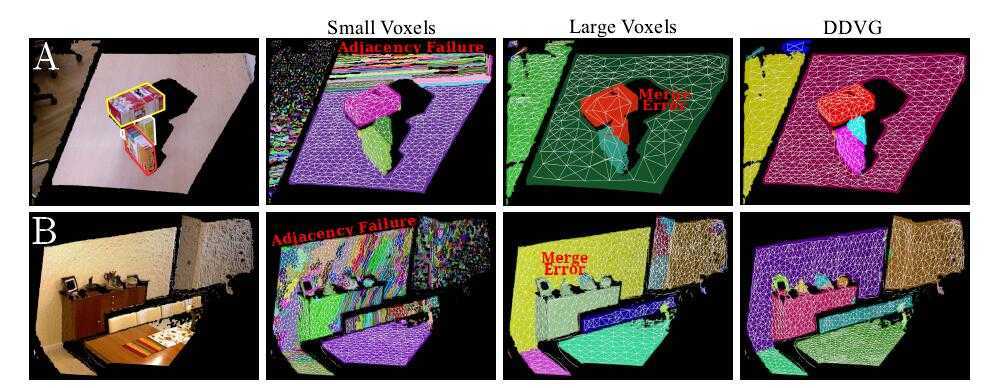
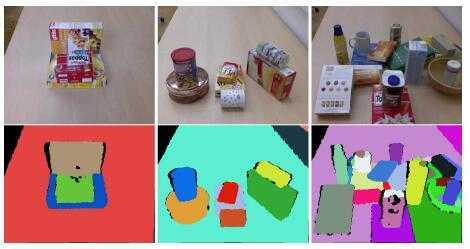
从图中可知,纠缠在一起,颜色形状相近的物体完全被分割开了,如果是图像分割要达到这个效果,那就。。。。。呵呵呵。。。。
3. PCL的实现
官网并未给出具体实现并测试,我不对以下代码有效性负责。
1.超体聚类
//设定结晶参数 float voxel_resolution = 0.008f; float seed_resolution = 0.1f; float color_importance = 0.2f; float spatial_importance = 0.4f; float normal_importance = 1.0f; //生成结晶器 pcl::SupervoxelClustering<PointT> super (voxel_resolution, seed_resolution); //和点云形式有关 if (disable_transform) super.setUseSingleCameraTransform (false); //输入点云及结晶参数 super.setInputCloud (cloud); super.setColorImportance (color_importance); super.setSpatialImportance (spatial_importance); super.setNormalImportance (normal_importance); //输出结晶分割结果:结果是一个映射表 std::map <uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters; super.extract (supervoxel_clusters);
std::multimap<uint32_t, uint32_t> supervoxel_adjacency;
super.getSupervoxelAdjacency (supervoxel_adjacency);
2.LCCP
//生成LCCP分割器 pcl::LCCPSegmentation<PointT>::LCCPSegmentation LCCPseg; //输入超体聚类结果 seg.setInputSupervoxels(supervoxel_clusters,supervoxel_adjacency); //CC效验beta值 seg.setConcavityToleranceThreshold (concavity_tolerance_threshold); //CC效验的k邻点 seg.setKFactor (k_factor_arg) // seg.setSmoothnessCheck (bool_use_smoothness_check_arg,voxel_res_arg,seed_res_arg,smoothness_threshold_arg = 0.1); //SC效验 seg.setSanityCheck (bool_use_sanity_criterion_arg); //最小分割尺寸 seg.setMinSegmentSize (min_segment_size_arg) seg.segment(); seg.relabelCloud (pcl::PointCloud<pcl::PointXYZL> &labeled_cloud_arg);
综上所述,LCCP算法在相似物体场景分割方面有着较好的表现,对于颜色类似但棱角分明的物体可使用该算法。(比如X同学仓库里那一堆纸箱)